
![]()
Experiencia del proyecto ENAP PIAM
Gustavo Klein
Techint
Acerca del autor
Gustavo Klein es coordinador de gerencia de proyectos en Techint. Cuenta con amplia experiencia en instrumentación y control. Durante su vida profesional ha estado a cargo de jefatura del departamento electricidad e instrumentación, gerencia de ingeniería, jefatura de la oficina técnica en obra, coordinación técnica de compra de unidades criogénicas y jefatura de instrumentación y control para diversos proyectos de envergadura tanto en el país como en el exterior.
 Plataforma AM3
Plataforma AM3
En este artículo desarrollamos, los resultados de la experiencia del proyecto ENAP PIAM (Proyecto Incremental Magallanes) inaugurado en 2018, donde se aplicaron conceptos y desarrollos novedosos de metrología.
Se trata de un proyecto incremental, una ampliación de la planta existente diseñada durante los años 2016 y 2017, que se puso en marcha en 2018. Como su nombre indica, pertenece a la empresa ENAP Sipetrol, en consorcio con YPF.
Consistió en la construcción de una planta nueva de procesamiento de gas a compresión, instalación de plataformas offshore, tendido y cañerías submarinas, remodelación y puesta en valor de la planta existente, etc. Los detalles del proyecto son los siguientes:
+ Diseño y construcción de una nueva planta de tratamiento y compresión de gas 1,6 MMScm por día
+ Instalación de nuevo equipamiento en plataformas offshore AM2 y AM3
+ Tendido de cañería submarina de catorce pulgadas (14’’) por veinte kilómetros (20 km)
+ Tendido de ductos onshore de vinculación (14, 12, 10 y 4 pulgadas)
+ Revamping de la planta existente de gas Petrofaro (ex Faro Vírgenes) 2,4 MM5cm por día
+ Trabajos adicionales en plataformas AM1, AM5 y AM6
+ Diseños adicionales de tendidos de reemplazos tuberías submarinas entre plataformas de ocho y seis pulgadas (8 y 6’’)
 Ubicación de ENAP PIAM
Ubicación de ENAP PIAM
El proyecto se ubica en el extremo sur de la provincia de Santa Cruz, donde solo distan cuatrocientos metros entre el océano Atlántico y el límite con Chile, lo cual implicaba dificultades de diseño para la planta onshore, dado el poco espacio.
Offshore, hay cinco plataformas desde las cuales se realiza la extracción de gas y petróleo: AM1, AM2, AM3, AM5 y AM6. En ellas se lleva a cabo un primer procesamiento de los recursos, y luego se envían a la planta en tierra a través de cañerías submarinas. Las dos plataformas principales son AM3, con mayor preponderancia de manejo de gas, de hecho cuenta con compresores para potenciar la extracción, y AM2, para petróleo.
Algunos desafíos
La profundidad de los ductos submarinos que acceden a la plataforma AM3, por ejemplo, están en el orden de los setenta metros (70 m), con lo cual el tendido de cañería submarina no presentaba excesivas desventajas, aunque tampoco estaba exento de algunas dificultades. Lo mismo ocurría con las demás plataformas.
El tendido se realiza con barcos especiales que deben monitorear continuamente la posición de tendido de los caños en el fondo del mar mediante tecnologías GPS siguiendo una ruta predeterminada por la topografía del fondo del mar.
Las tareas de ingeniería fueron desafiantes, porque debían combinarse con la constructividad y el tendido propio de la cañería. El barco encargado del tendido debía depositar la cañería en el fondo del lecho hasta acceder a la caja de aproximación, o target box. Allí donde terminaba el tendido submarino, comienzan los spooleados, que son tramos de cañería con medidas exactas (de determinadas dimensiones) y accesorios para poder arribar o acometer a la plataforma y ascender a través del tubo riser, que conecta el tendido submarino con la plataforma.
Para llevar a cabo una buena tarea, los spooles se debían construir y colocar de manera precisa, con gran nivel de exactitud y muy bajo nivel de incertidumbre. Dado que su colocación está a cargo de buzos y que se trata de un área de conexión entre la plataforma y la cañería submarina, previo a cualquier tarea, se necesitaban, por ejemplo, los datos exactos de posición geográfica de las plataformas. Durante el tendido, además, el barco se guía por la posición geográfica precisa de la caja de aproximación. 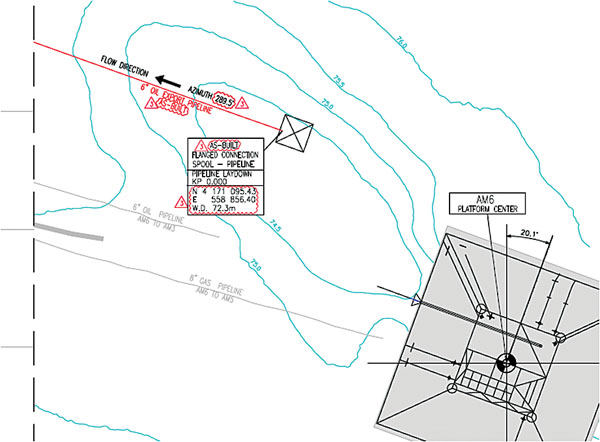 Tendido de ductos
Tendido de ductos
Problemas iniciales
Antes de comenzar con el proyecto, el cliente proporcionó información, que incluía el relevamiento topográfico de las plataformas. Lamentablemente, las posiciones de inicio fueron erróneas, en algunas de las plataformas.
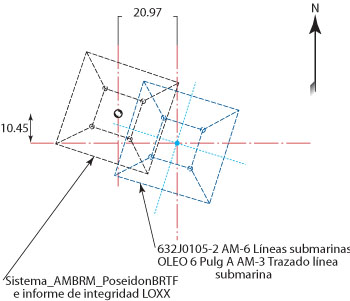
AM6, por ejemplo, presentaba un error de ubicación de coordenadas de veinte metros en el eje horizontal y de diez metros en el eje vertical, es decir, una hipotenusa de veinticinco metros (25 m) de desviación. En AM3 se encontró un error de dos metros en el eje horizontal y de siete metros en el vertical.
Con tecnología desarrollada de metrología de ubicación geográfica fue posible acceder a un nivel casi exacto de la plataforma y solucionar el problema.
Sistemas de ubicación geográfica
Con el famoso sistema de latitud y longitud es posible ubicar cualquier punto sobre la Tierra. A partir de allí, se desarrollaron sistemas de coordenadas proyectadas, de las cuales quizá la más conocida sea la cilíndrica.
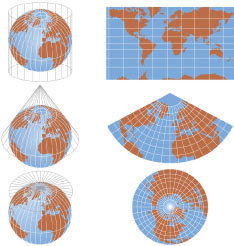 Proyecciones cartográficas habituales
Proyecciones cartográficas habituales
El problema de las coordenadas proyectadas, sea cilíndrica, cónica o estándar, es que por encima y por debajo del Ecuador, los círculos que definen las líneas paralelas de latitud se vuelven gradualmente más pequeños hasta que se convierten en un solo punto en los polos norte y sur, donde convergen los meridianos. Mientras los meridianos convergen hacia los polos, la distancia que representa un grado de longitud disminuye a cero. En el esferoide de Clarke 1866, un grado de longitud en el Ecuador equivale a 111.321 kilómetros, mientras que a una latitud de sesenta grados (60°), solo equivale a 55.802 kilómetros. Ya que los grados de latitud y longitud no poseen una longitud estándar, no es posible medir distancias o áreas en forma precisa o visualizar datos fácilmente en un mapa plano o una pantalla de ordenador.
El Sistema de coordenadas universal transversal de Mercator (UTM, en inglés) es un sistema de coordenadas basado en la proyección cartográfica transversa de Mercator, que se construye como la proyección de Mercator normal, pero en vez de hacerla tangente al Ecuador, se la hace secante a un meridiano.
A diferencia del sistema de coordenadas geográficas expresadas en latitud y longitud, las magnitudes en el sistema UTM se expresan en metros únicamente al nivel del mar, que es la base de la proyección del elipsoide de referencia.
A partir de esa proyección, se definen zonas en todo el mundo, y es posible disminuir el error. En el caso de la zona tan austral en la que estaba el situado el proyecto, su ubicación se definía como zona 19S de la UTM. Vale decir que tal posición exigía un sistema de corrección formal, justamente por las distorsiones que ocurren cuando los meridianos se acercan al polo. Probablemente el error de las primeras mediciones se debía a una traducción errónea entre un sistema de proyección y otro. 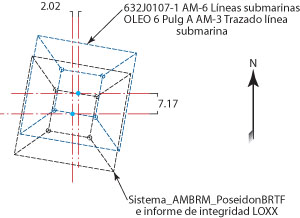 Problemas de coordenadas de las plataformas AM3 y AM6. AM3 arriba, AM6 a la derecha
Problemas de coordenadas de las plataformas AM3 y AM6. AM3 arriba, AM6 a la derecha
Tecnologías de ubicación geográfica
De las tecnologías que se utilizan para las mediciones geográficas, la más conocida es el GPS, que se vale de la ubicación de los satélites, y a partir de mediciones de tiempo y ubicaciones de estos, es posible determinar la posición del instrumento o del elemento que se quiera.
El GPS comercial común presenta errores de hasta 2,5 metros, aproximadamente, por lo que no es el instrumento ideal para aplicaciones más exigentes. Para estas últimas, se utiliza comúnmente un DGPS (GPS diferencial), que toma como base una localización fija exacta a la cual referir y a partir de la cual corregir la precisión. Asimismo existen sistemas GNSS (“Global Navigation Satellite System”).
La solución en el proyecto ENAP PIAM
Para llevar a cabo la medición de la posición de las plataformas, se utilizó el sistema RTX (del inglés “Real Time eXtended”), en particular, Trimble rtx.
El sistema es un GPS potenciado, que se basa en estaciones de recepción de los satélites distribuidas en todo el mundo, que luego envían esa información a centros de cómputos del propio sistema, que procesa las señales de los satélites y produce la corrección de la posición. Todo el proceso conduce a aumentar la precisión de ubicación hasta el orden de uno o dos centímetros en el eje horizontal, y de dos a cuatro centímetros en el eje vertical. Es la mayor precisión lograda de ubicación geográfica mundial.
Todo esto se vale de la tecnología digital, pero no solo eso. La estación del operador del topógrafo puede recibir las correcciones vía internet o vía satélite, superando la medición de un GPS estándar, porque corrige todos los factores de error comunes (la ionosfera, el propio reloj de los satélites, etc.).
Gracias al avance tecnológico digital se ha logrado desarrollar este sistema que permite una gran ventaja.
Capacidades del sistema Trimble rtx:
+ Alcanza hasta 2,5 centímetros de error (precisión de 95 por ciento) en tiempo real.
+ No necesita estación de base, con lo cual evita la preocupación por las señales de radio.
+ Opciones de servicio disponibles en el celular por vía satelital.
Conclusiones (lecciones aprendidas)
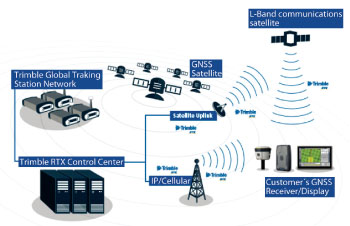 Sistema Trimble rtx
Sistema Trimble rtx
+ Verificar en etapa temprana la fiabilidad de los datos de partida, especialmente topográficos y ubicación geográficas para no tener sorpresas.
+ Usar tecnología de punta (RTX, GPS, sistemas satelitales, DGPS, etc.)
+ Configurar correctamente instrumentos de medición y las conversiones a sistemas de proyección, para no arrastrar errores de traducción.
Nota del editor. El artículo aquí presentado fue elaborado por Alejandra Bocchio para AADECA Revista en base a la presentación que Gustavo Klein hiciera en el Panel de Metrología en la Era Digital que se llevó a cabo en la última edición de AADECA ‘18 “Evolucionando en la era digital”.